File Operations
+ + +Code Editing
+ + +Project Management
+ + +MCP Integration
+ + +File Operations
+ + +Code Editing
+ + +Project Management
+ + +MCP Integration
+ + +File Operations
+ + +Code Editing
+ + +Project Management
+ + +MCP Integration
+ + +File Operations
+ + +Code Editing
+ + +Project Management
+ + +MCP Integration
+ + +Metric: %{x}
Score: %{y}
Metric: %{x}
Score: %{y}
Metric: %{x}
Score: %{y}
WiFi DensePose
+Human Tracking Through Walls Using WiFi Signals
+Revolutionary WiFi-Based Human Pose Detection
++ AI can track your full-body movement through walls using just WiFi signals. + Researchers at Carnegie Mellon have trained a neural network to turn basic WiFi + signals into detailed wireframe models of human bodies. +
+ +Through Walls
+Works through solid barriers with no line of sight required
+Privacy-Preserving
+No cameras or visual recording - just WiFi signal analysis
+Real-Time
+Maps 24 body regions in real-time at 100Hz sampling rate
+Low Cost
+Built using $30 commercial WiFi hardware
+Hardware Configuration
+ +3×3 Antenna Array
+WiFi Configuration
+Real-time CSI Data
+Live Demonstration
+ +WiFi Signal Analysis
+Human Pose Detection
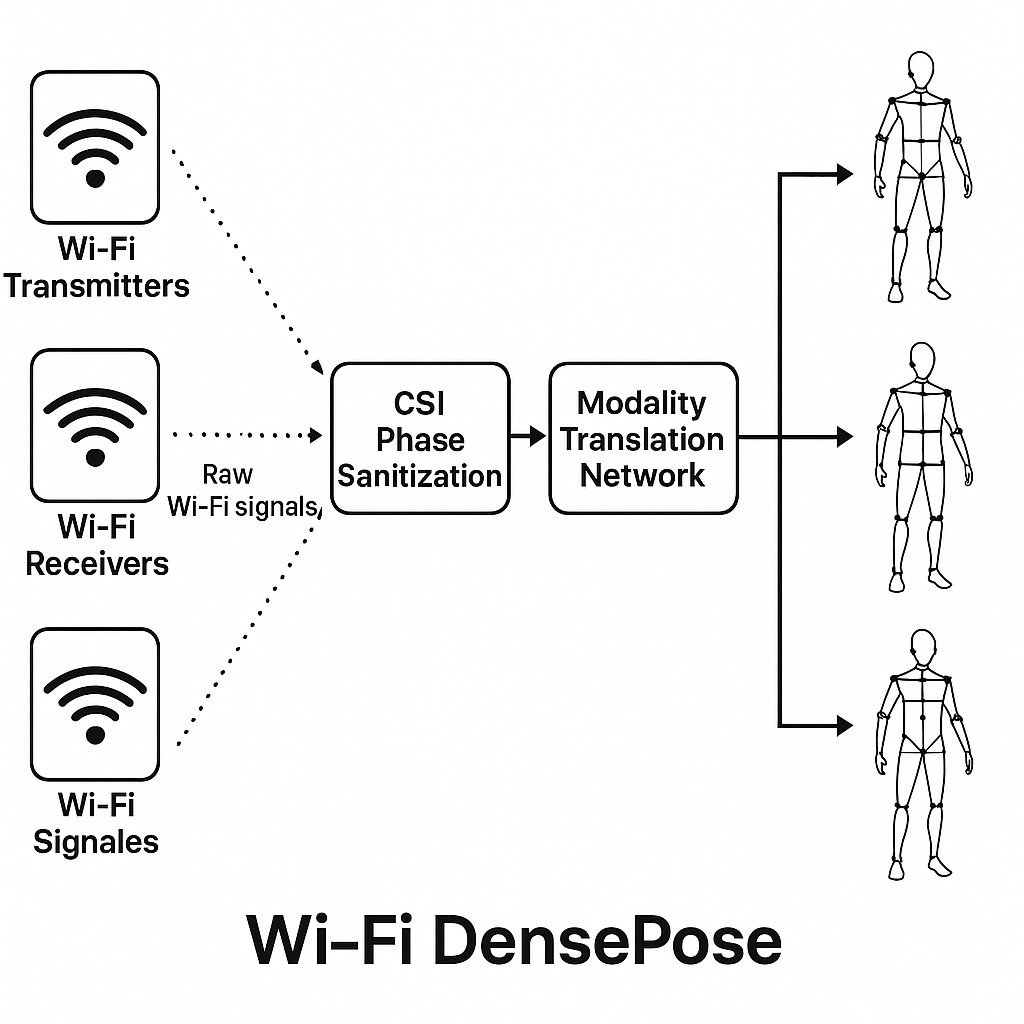
+System Architecture
+ + +
+
+
+ CSI Input
+Channel State Information collected from WiFi antenna array
+Phase Sanitization
+Remove hardware-specific noise and normalize signal phase
+Modality Translation
+Convert WiFi signals to visual representation using CNN
+DensePose-RCNN
+Extract human pose keypoints and body part segmentation
+Wireframe Output
+Generate final human pose wireframe visualization
+Performance Analysis
+ + +
+ WiFi-based (Same Layout)
+Image-based (Reference)
+Advantages & Limitations
+Advantages
+-
+
- Through-wall detection +
- Privacy preserving +
- Lighting independent +
- Low cost hardware +
- Uses existing WiFi +
Limitations
+-
+
- Performance drops in different layouts +
- Requires WiFi-compatible devices +
- Training requires synchronized data +
Real-World Applications
+ +Elderly Care Monitoring
+Monitor elderly individuals for falls or emergencies without invading privacy. Track movement patterns and detect anomalies in daily routines.
+Home Security Systems
+Detect intruders and monitor home security without visible cameras. Track multiple persons and identify suspicious movement patterns.
+Healthcare Patient Monitoring
+Monitor patients in hospitals and care facilities. Track vital signs through movement analysis and detect health emergencies.
+Smart Building Occupancy
+Optimize building energy consumption by tracking occupancy patterns. Control lighting, HVAC, and security systems automatically.
+AR/VR Applications
+Enable full-body tracking for virtual and augmented reality applications without wearing additional sensors or cameras.
+Implementation Considerations
+While WiFi DensePose offers revolutionary capabilities, successful implementation requires careful consideration of environment setup, data privacy regulations, and system calibration for optimal performance.
+